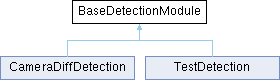
An abstract base class (Interface) that defines the contract for detection algorithms. This class allows the Controller to remain agnostic of the specific detection method (e.g., Color, AI, or Motion) by providing a consistent interface. More...
#include <base_detection_module.h>
Public Member Functions | |
| virtual | ~BaseDetectionModule ()=default |
| Virtual destructor to ensure proper cleanup of derived classes. | |
| virtual std::tuple< MoveX, MoveY > | detect_object (camera_buffer_t frame)=0 |
| Analyzes a camera frame to locate a specific object. | |
| virtual MotionData | get_motion_data () const |
| Get the latest motion data from the detection module. | |
Detailed Description
An abstract base class (Interface) that defines the contract for detection algorithms. This class allows the Controller to remain agnostic of the specific detection method (e.g., Color, AI, or Motion) by providing a consistent interface.
Member Function Documentation
◆ detect_object()
|
pure virtual |
Analyzes a camera frame to locate a specific object.
- Parameters
-
frame Pointer to the ESP32-CAM frame buffer (camera_fb_t).
- Returns
- std::tuple<uint8_t, uint8_t> Returns a tuple containing:
Implemented in CameraDiffDetection.
◆ get_motion_data()
|
inlinevirtual |
Get the latest motion data from the detection module.
This method provides access to the motion metrics detected. Derived classes should override this to return their current metrics.
- Returns
- MotionData containing the latest detection results.
Reimplemented in CameraDiffDetection.
The documentation for this class was generated from the following file:
- lib/detection/include/base_detection_module.h